
 发布内容
发布内容













MIT研发3D打印软磁性水凝胶新工艺:微结构内部实现独立磁控运动
麻省理工学院(MIT)的研究人员开发了一种软磁性水凝胶的制造方法,可通过3D打印制成小于1毫米的结构,并利用普通磁铁远程激活。
根据发表在《Matter》期刊上的研究论文,瑞士洛桑联邦理工学院(EPFL)和辛辛那提大学也参与了这项研究。
团队解决的核心技术问题多年来一直阻碍着这一研究方向。标准微结构制造依赖双光子聚合(2PP)。当研究人员试图事先将磁性纳米颗粒加载到树脂中时,金属颗粒会散射或吸收激光,从而削弱最终结构或使其完全无法成型。
MIT团队的解决方案是将打印步骤与磁化步骤完全分离。他们首先使用普通聚合物凝胶打印结构,不添加任何磁性材料。然后将打印好的结构浸泡在铁离子溶液中,凝胶吸收铁离子,再第二次浸泡在氢氧根离子溶液中。两组离子在凝胶内部反应生成铁氧化物纳米颗粒,这些颗粒本身具有磁性。由于磁性是在打印后引入的,激光不受干扰,因此该技术的结构分辨率得以保留。
该方法还让研究人员能够控制结构中任何单个特征的磁性强弱。通过调整打印特定部分时的激光功率,他们可以改变该区域凝胶的交联紧密程度。更紧密的凝胶吸收更少的离子,最终磁性更弱;更疏松的凝胶吸收更多。这意味着单个打印结构可以在同一亚毫米架构内拥有具有显著不同磁响应的部件。
微结构内部独立部件的运动
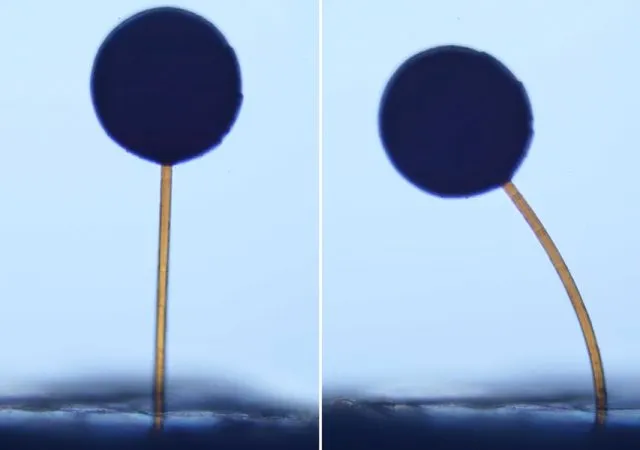
作为概念验证,团队打印了一组棒棒糖形状的结构,每个高度小于1毫米,球形尖端比沙粒还小。每个球体注入了不同浓度的磁性颗粒。当一块冰箱磁铁在培养皿上方移动时,这些结构以类似握拳的渐变顺序弯曲并朝磁铁方向拉动。
第二个演示使用相同的凝胶构建了一个双稳态开关:一个1毫米长的矩形,两侧带有约8微米厚的桨状磁性臂,宽度大致相当于一个红细胞。在一端施加磁铁会使桨翻转并将矩形锁定在一个位置;将磁铁移到另一端则反转。研究人员认为,这种装置可以用作微流控电路中的磁控阀门。
讨论的实际应用主要是医疗领域。这种结构可以通过外部磁铁在体内引导,原则上可用于向特定位置输送药物或在无需手术的情况下收集组织样本。此前已有类似的磁性微器件被提出,但早期设计主要通过将整个结构朝磁铁方向拉动来工作。而MIT团队构建的是单个结构内独立部件的运动,这使得在这一尺度上实现更复杂的任务(如抓取)成为可能。
在微观物体内实现这种选择性、局部化的运动,是这项研究与早期磁性微机器人工作的区别所在。该制造工艺能否适应临床级生产,或能否以任何有意义的方式规模化,仍是论文未涉及的问题。该研究部分得到了美国国家科学基金会和MathWorks种子基金的支持。
在打印前将磁性颗粒直接嵌入树脂的方法并不新鲜。2014年,苏黎世联邦理工学院的研究人员使用双光子聚合技术,从加载了磁性纳米颗粒的生物相容性环氧树脂中制造出螺旋状微致动器,产生约60微米长的结构,可通过外部磁场在液体中引导。在那方法中,磁性功能必须在制造过程中与打印过程本身同时建立。而MIT的双浸泡工艺通过将两个步骤分离消除了这种依赖:先打印不含磁性材料的结构,之后引入磁性,从而避免了对制造方法的干扰,同时实现了单个微结构内磁响应的空间变化。
这项研究题为《磁响应性可微打印软纳米复合材料及其可调纳米颗粒负载》,由Rachel M. Sun、Andrew Y. Chen、Yiming Ji、Eric M. Stewart、Daryl W. Yee和Carlos M. Portela共同完成。
 点赞
点赞
 反对
反对
 收藏
收藏
 分享
分享


AM易道
读懂3D打印卓越与演变之道
 标签
标签
 近期热门
近期热门












 读懂3D打印卓越与演变之道
读懂3D打印卓越与演变之道