
 发布内容
发布内容













哈佛3D打印仿生人造肌肉丝线:遇热弯曲扭转,100次循环无退化
哈佛大学约翰·A·保尔森工程与应用科学学院的研究人员开发了一种基于旋转多材料3D打印的细丝制造方法,这些细丝直径比头发丝还细,能够随温度变化而弯曲、扭转、膨胀或收缩,本质上相当于可编程的人工肌肉。这项成果发表在《美国国家科学院院刊》上,由汉斯约格·维斯仿生工程教授Jennifer A. Lewis与L. Mahadevan教授和Joanna Aizenberg教授共同领导,博士后研究员Mustafa Abdelrahman担任第一作者。
该技术依托于Lewis实验室开发的旋转多材料3D打印平台,使用定制双通道喷嘴,共挤出两种弹性体:一种活性液晶弹性体,当加热到其向列-各向同性转变温度以上时,会沿其分子排列方向收缩;另一种被动丙烯酸酯弹性体,无论温度如何均保持形状。打印过程中通过旋转喷嘴,在活性液晶弹性体中写入螺旋形分子排列,从而在制造过程中预编程丝线的曲率和扭转响应。这两种材料显示出50倍的弹性模量差异,这为调节形状变化提供了额外的设计变量。在25°C至175°C之间的重复热循环下,经过100次循环后,丝线未观察到明显退化或界面分层。
「我看到这个非常漂亮的旋转3D打印平台时心想,如果我们接入活性材料并在丝线内对其进行图案化,能否以这种方式驱动形状变化?」Abdelrahman说。
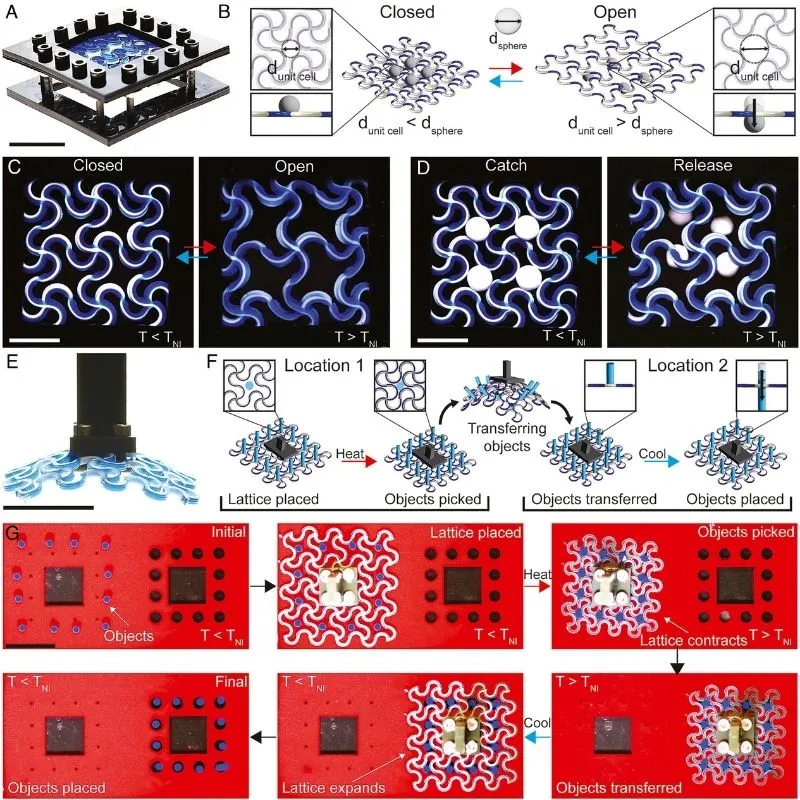
在展示技术潜力时,团队将单根编程细丝作为构建模块用于更复杂的结构。正弦形(波浪形)细丝在外观上完全相同,但根据活性材料的位置以相反方式行为:当弹性体位于波峰外侧时,细丝伸直并膨胀;当位于内侧时,则收紧并收缩。利用这些单元,研究人员组装了平面网格,能够响应热量张开和闭合,充当活性过滤器——加热时让颗粒通过,冷却时捕获颗粒;还可用作拾取-放置夹具,能同时抬起多根杆并按需释放——这与大多数一次只能处理一个物体的软体夹持器截然不同。一个由交替膨胀和收缩区域组成的网格在加热时变形为穹顶状结构,与计算机预测的模拟高度吻合。验证和建模是与自然结构力学专家L. Mahadevan教授合作完成的,而分子排列则通过Joanna Aizenberg教授实验室利用布鲁克海文国家实验室的X射线散射进行表征。
团队已打印出直径小至100微米的细丝,并认为还有进一步缩小尺寸的空间。但微型化是最直接的约束之一:喷嘴分辨率受限于用于制造定制共挤出头的DLP树脂打印机,这限制了特征尺寸在约50微米。虽然将喷嘴直径从1毫米减小到0.5毫米成功地将细丝直径从600微米降至300微米,但代价是:小尺寸下需要更低的打印速度,这反过来降低了液晶弹性体的剪切诱导分子排列。由于排列是驱动的关键,这在微型化和性能之间产生了直接权衡。温度依赖性则是另一个实际约束:所有驱动都依赖于将样品加热到液晶弹性体的向列-各向同性转变温度以上,在当前油墨配方中该阈值远高于环境条件。演示通过将网格浸入加热的硅油浴中进行,这与软体机器人和生物医学应用最终需要运行的无线、身体集成或环境条件环境相去甚远。
「在可扩展性方面,未来可以制造更复杂的喷嘴,集成其他材料——例如,设置液态金属通道以实现驱动,或集成其他功能。」研究生、共同作者Jackson Wilt说。团队设想的应用包括可重构软体夹具、可调过滤器和阀门,以及可在体内锁定成多孔、促凝血结构的注射式细丝,用于生物医学领域。Lewis总结道:「这种丝线设计和打印框架有望加速类肌肉材料从实验室向实际技术的转化。」
Lewis实验室的这一最新成果是哈佛大学在可编程软材料领域持续研究轨迹的一部分。该小组早前由Jackson Wilt和前博士后研究员Natalie Larson领导的一项研究,使用了相同的旋转多材料3D打印平台,生产了具有嵌入式驱动路径的软体机器人结构,指向了手术机器人和人类辅助技术中的应用。此外,Lewis和普林斯顿大学教员Emily Davidson完善了基于挤出3D打印过程中的液晶排列科学,将该过程从实验性艺术转变为更精确、可衡量的学科,这是大规模可靠制造LCE基材料的基础步骤。该研究的贡献作者包括Yeonsu Jung、Rodrigo Telles、Gurminder K. Paink和Natalie M. Larson。资金来自美国国家科学基金会(通过哈佛材料研究科学与工程中心)和陆军研究办公室的多学科大学研究计划。实验工作在两个联邦设施中完成:哈佛的纳米尺度研究中心和布鲁克海文国家实验室的同步辐射光源,分别由NSF和能源部支持。哈佛的技术转移办公室已着手保护这些底层创新的知识产权,并正在探索将其推向市场的途径。
 点赞
点赞
 反对
反对
 收藏
收藏
 分享
分享


AM易道
读懂3D打印卓越与演变之道
 标签
标签
 近期热门
近期热门












 读懂3D打印卓越与演变之道
读懂3D打印卓越与演变之道