
 发布内容
发布内容













德克萨斯大学研发3D打印磁性胶囊机器人,可精准导航胃部,革新胃肠道疾病诊疗
德克萨斯大学奥斯汀分校MINIMAX实验室的研究人员开发了一种可3D打印的、磁性可操控的胶囊机器人。
该机器人旨在用于胃肠道疾病的诊断和治疗,其目标是减少患者对侵入性内窥镜检查的依赖。
该实验室主任、研究论文的资深作者夏方舟进行这项研究有着非常个人的使命。他在2022年因反复发作的胆结石导致的胆管堵塞,经历了多次侵入性的内镜逆行胰胆管造影术。这一状况最终需要切除胆囊。
“并发的COVID感染加重了并发症,导致我多次前往急诊室并反复接受ERCP手术,”夏方舟表示。“经历了多次ERCP后,我深切体会到内窥镜检查有多么侵入性,包括严重的咽喉刺激、不适和操作负担,尽管这些检查是出于诊断和治疗的必要性。”
在这次经历之后,夏方舟联系了麻省理工学院的Giovanni Traverso教授,后者在可摄入机器人领域的研究引起了他的注意,由此开始共同“为可摄入和可植入传感系统制定一种体域网络愿景”。
“在这项工作中,我们专注于胶囊机器人在胃肠道,特别是在胃区域的磁导航,”夏方舟解释道。
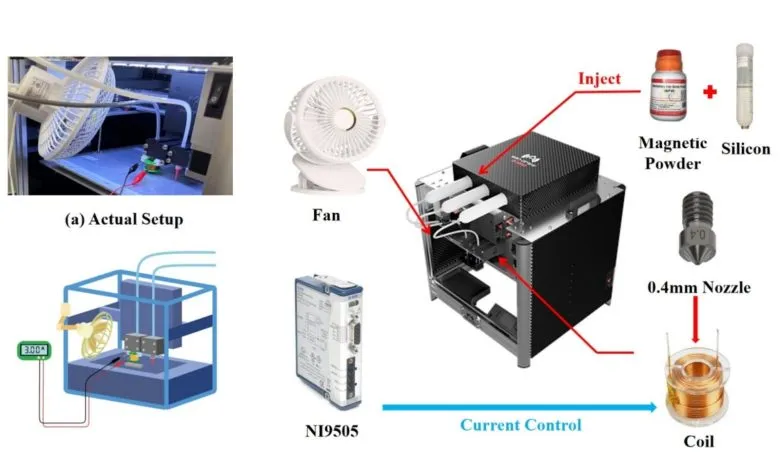
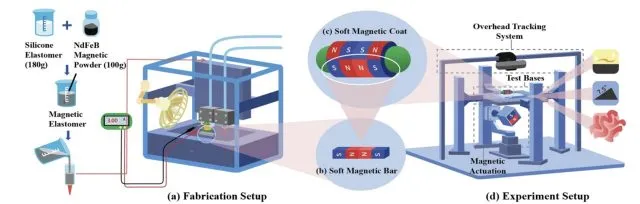
该胶囊的外壳涂有一层由软磁材料制成的外壳,这种材料是通过将钕铁硼颗粒混合到硅胶中制成的。
随后在3D打印沉积过程中,通过控制磁化方向,创造了一种“优化的NSSN/SNNS磁场分布模式”。
简而言之,取消了笨重的内部磁体后,为摄像头、传感器、药物储库、活检工具或其他治疗组件腾出了空间。
这种磁化模式也意味着在旋转的外部磁场下,可以实现可预测、稳定的滚动和转向,无需复杂的反馈控制算法。
研究团队在光滑、倾斜、干燥和湿润的纹理表面上验证了其运动能力,研究人员称,这证明了其在“模拟胃部环境的条件下具备鲁棒性”。
02-26 09:26
转载自:voxelmatters,如对内容有疑问,请联系我们:yihanzhong@amedao.com
 点赞
点赞
 反对
反对
 收藏
收藏
 分享
分享


AM易道
读懂3D打印卓越与演变之道
 标签
标签
UT Austin
MIT
MINIMAX实验室
夏方舟
Giovanni Traverso
3D打印
胶囊机器人
胃肠道诊断
磁性操控
ERCP
内窥镜
钕铁硼
硅胶
软磁材料
NSSN/SNNS磁场分布
 近期热门
近期热门












 读懂3D打印卓越与演变之道
读懂3D打印卓越与演变之道