
 发布内容
发布内容













麻省理工研发首个3D编织超材料设计框架,可逐根纤维编程,软体机器人、可穿戴设备迎来突破
麻省理工学院的研究团队开发出一套用于设计柔软、灵活且可编程的三维编织超材料的计算框架。
该研究成果以《可编程三维编织超材料的设计框架》为题发表于《自然-通讯》期刊。
这被认为是首个将柔软三维编织超材料的设计、模拟和制造完全集成的框架。
与传统依赖刚性和轻质结构的超材料不同,这些编织晶格可以逐根纤维进行调整,以实现受控的拉伸、弯曲或失效方式。
其目的是为软体机器人、可穿戴设备和柔性电子产品等应用开辟新的可能性。
该工作由研究人员Molly Carton, James Utama Surjadi, Bastien F. G. Aymon和Ling Xu共同完成,并得到了机械工程副教授Carlos Portela的指导,同时利用了麻省理工学院的MIT.nano设施。
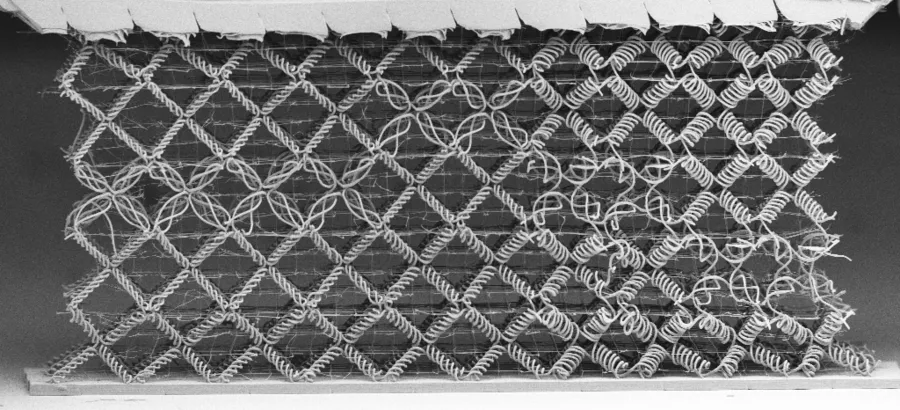
新框架能够创建由相互交织的纤维构成的三维编织结构。
这些纤维自接触并纠缠,产生独特的、可编程的行为。
Carlos Portela教授解释道,这一框架使任何人都能以前所未有的方式设计晶格在拉伸时的形状变化、纤维的纠缠打结方式以及撕裂模式。
这突破了以往手工设计的局限。
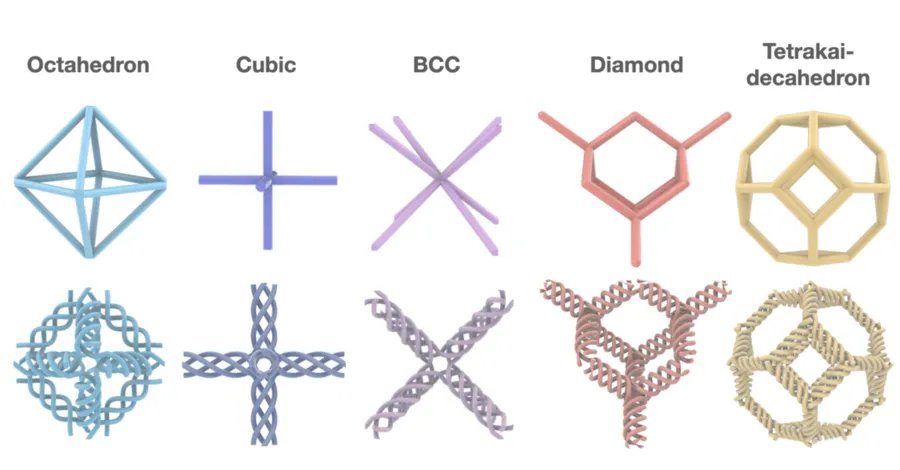
该框架采用基于图形的设计算法,将用户规格转换为精确的纤维布局。
每个编织单元胞都可以使用纤维半径和螺距等参数进行分级和定制。
用户可以在3D打印前模拟变形、自接触和纠缠,预测材料将如何拉伸、弯曲或失效。
主要作者Molly Carton表示,这种定制性使材料能够表现出异常广泛的行为范围,这些行为很难使用传统的软材料来设计。
通过发布开源代码,麻省理工学院团队鼓励其他研究人员探索新的图案、优化性能,并开发全新的应用。
在麻省理工学院取得此项进展之前,3D打印超材料的设计往往是固定的、均匀的或通过手动优化,限制了可调性和可编程性。
麻省理工学院的框架通过将设计、仿真和制造集成到单一工具中,消除了这些限制,实现了编织晶格的逐纤维定制。
然而,挑战依然存在。
模拟复杂的纤维排列可能计算量很大。
3D打印过程中纤维放置的精度至关重要,微小的偏差可能会导致意外的变形或降低机械性能。
为工业化生产或高通量应用放大这些设计仍具有挑战性,因为一致地复制精确的纤维放置和纠缠是困难的。
 点赞
点赞
 反对
反对
 收藏
收藏
 分享
分享


AM易道
读懂3D打印卓越与演变之道
 标签
标签
 近期热门
近期热门












 读懂3D打印卓越与演变之道
读懂3D打印卓越与演变之道